







摘要:注塑机专用机械手是模仿人类手臂的结构与动作,代替人类完成取件作业以实现注塑机的自动化生产。本文设计的注塑机专用机械手以西门子小型PLC作为控制器,配合注塑机的生产过程,实现塑料制品的取出并放置到指定位置。
本文研究设计注塑机取件机械手[1-2],选用PLC作为主控制器,实现注塑机中塑料制品取出[3]。注塑机专用机械手实现手臂伸出—手臂下降—吸盘吸取—手臂上升—手臂缩回—手臂下降—吸盘松开—手臂上升等动作配合注塑机完成注塑生产。
1.系统硬件设计
注塑机机械手主要是配合注塑机完成注塑生产,对精度要求相对较低,选择三相异步电机作为驱动电机,位置控制通过限位开关实现。因塑料制品重量轻但易损坏,选择吸盘而不是硬件夹紧的方式抓取工件,不仅动作迅速、结构简单,还可以有效地避免了夹损工件。同时吸盘的抓取处设有光电传感器,主要用来检测是否成功吸取或者释放工件。注塑机机械手的硬件设计如图1所示。
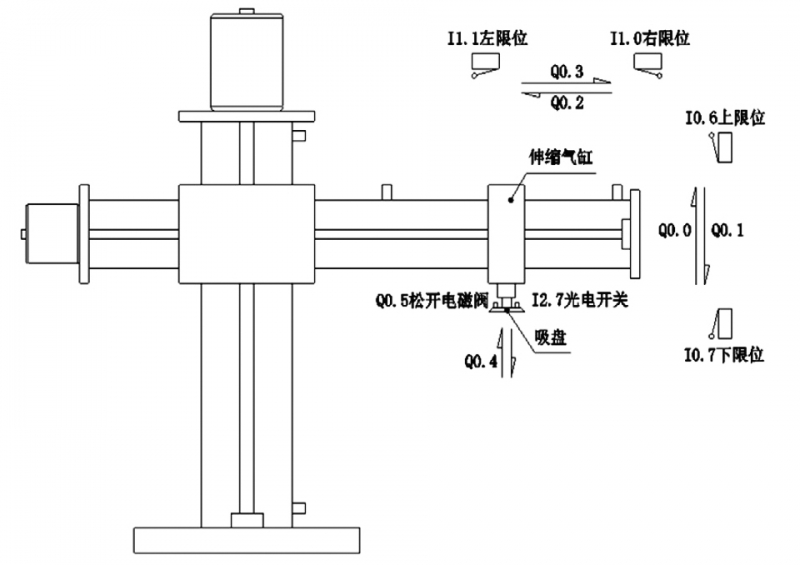
图1 注塑机专用机械手的硬件
2.系统的软件设计
1)公用程序
公用程序主要完成初始化,并负责手动、自动等工作方式切换的协调工作。公用程序如图2所示,主要实现以下功能:①在自动工作方式下,必须从原点位置开始执行,若不在初始位置,则自动程序不执行;②当处于手动或者回原点工作方式时,复位非初始步即除初始步以外的各步对应的位存储器,确保系统不会在自动切换到手动后又返回自动工作方式时存在两个活动而不出现异常状况。
公用程序主要完成初始化,并负责手动、自动等工作方式切换的协调工作。公用程序如图2所示,主要实现以下功能:①在自动工作方式下,必须从原点位置开始执行,若不在初始位置,则自动程序不执行;②当处于手动或者回原点工作方式时,复位非初始步即除初始步以外的各步对应的位存储器,确保系统不会在自动切换到手动后又返回自动工作方式时存在两个活动而不出现异常状况。
2)手动程序
如图3所示:①电动机的正反转互锁,如机械手上升与下降互锁、伸出与缩回;②位置保护,如用限位开关限制机械手的升降伸缩范围;③安全保护,如通过限位开关确保机械手只在高位才能伸缩;只在最左或最右位置才能上升下降以及松开工件。
如图3所示:①电动机的正反转互锁,如机械手上升与下降互锁、伸出与缩回;②位置保护,如用限位开关限制机械手的升降伸缩范围;③安全保护,如通过限位开关确保机械手只在高位才能伸缩;只在最左或最右位置才能上升下降以及松开工件。
3)自动程序
自动程序设计主要考虑与注塑机协调工作,机械手收到注塑机开模完成塑料制品的加工信号时,开始按照自动程序设计的动作开始执行取件工作,同时切断闭模信号,确保机械手取物的时候注塑机不工作,以确保其安性全。同时为了避免出现抓取失败的情况,通过光电传感器来检测物体是否抓取成功。机械手的动作顺序功能图如图4所示。
自动程序设计主要考虑与注塑机协调工作,机械手收到注塑机开模完成塑料制品的加工信号时,开始按照自动程序设计的动作开始执行取件工作,同时切断闭模信号,确保机械手取物的时候注塑机不工作,以确保其安性全。同时为了避免出现抓取失败的情况,通过光电传感器来检测物体是否抓取成功。机械手的动作顺序功能图如图4所示。
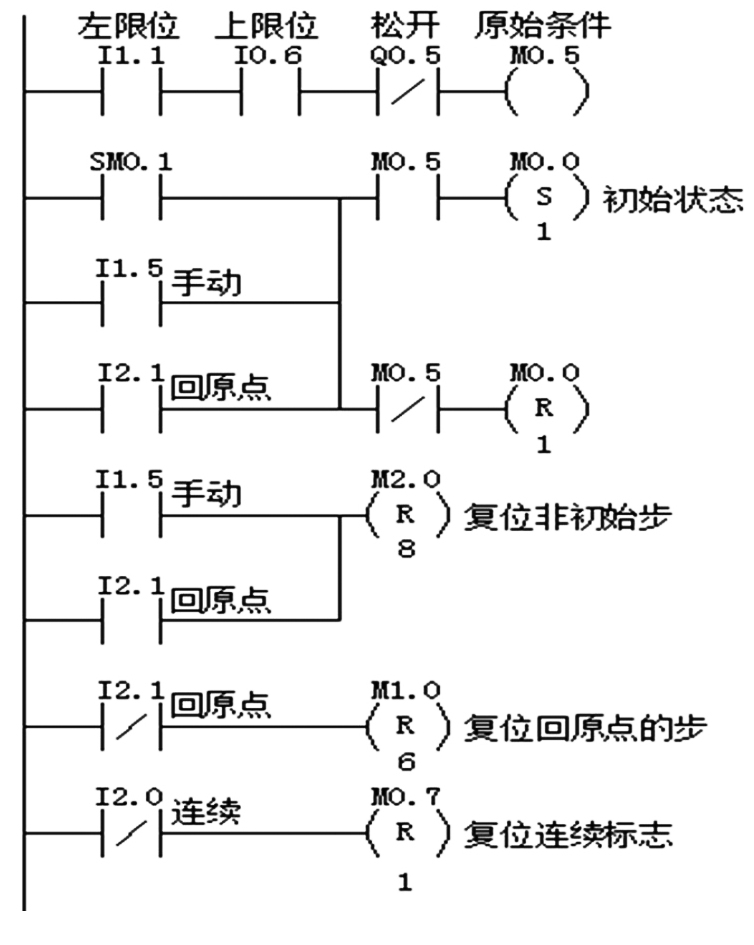
图2公用程序
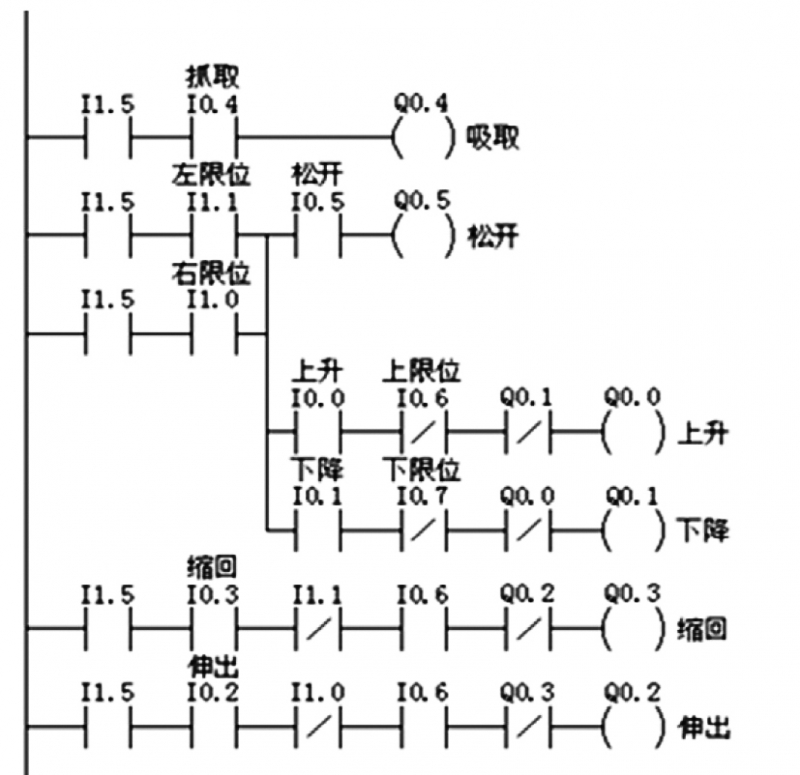
图3手动程序
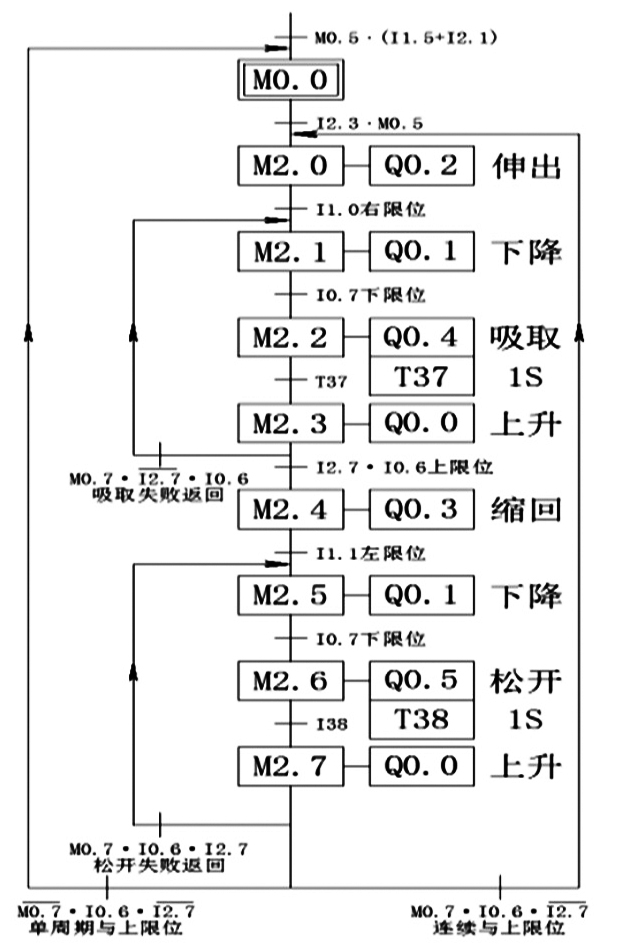
图4自动程序顺序功能图
3.结束语
本设计使用的是注塑机专用机械手,采用基于PLC作为主控制器,具有体积小、响应速度快、可靠性高、易于维护、并随时可依生产工艺的不同要求而随机修改等诸多优点,可有效的,完成塑料制品的取出,实现自动化生产。
 玻纤含量对长玻纤...
玻纤含量对长玻纤... 钙钛矿薄膜的均匀...
钙钛矿薄膜的均匀... 用于光伏板静电除...
用于光伏板静电除... 聚砜医疗干粉吸入...
聚砜医疗干粉吸入...













